2023年10月29日,山东大学、山东高速集团成功主办交通运输工程科技创新学术会议——暨“未来交通”院长论坛,在开幕式中山东省交通运输厅和山东大学的领导分别进行致辞。
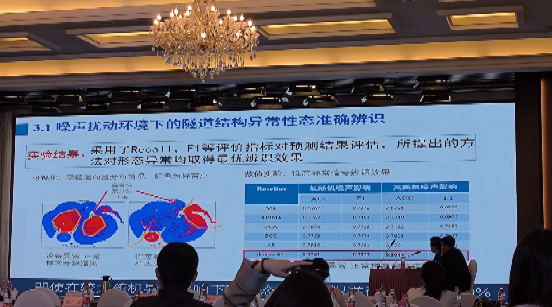
在特邀报告中来自北京航空航天大学的于滨教授做了题为“智能交通技术与系统发展趋势与展望”的报告,于滨教授首先介绍了基于研制的ETC2.0前段装备,实现了预知性诱导服务,并提出了基于供需双边适配的应急资源靶向调度方法,实现了应急场景下的资源优先分配。其次介绍了噪声扰动环境下的隧道结构异常性态准确辨识实验,实验结果显示:采用了Recall,F1等评价指标对预测结果评估,所提出的方法对形态异常均取得最优辨识效果。最后提出了有关的技术路线,如数据特征与力学知识耦合驱动的AI粒子仿真的技术路线:通过人工智能图表示学习挖掘隐形关系,将计算过程形式化为离散图信息传递与更新过程,实现了求解过程代理与加速。
中山大学的蔡铭教授在题为“自主式交通系统体系架构研究”的报告中首先介绍了该课题的背景,如自主式交通系统的目标、特质和能力等并展示了在车路协同场景下的交通系统架构示例。其次从解析自主式交通系统构成元素、研究系统自主化能力演化过程和实现系统架构构建及仿真三个方面展开论述,明确五类要素之间的关联关系,分别建立基于Petri网的宏观演化模型和基于群体博弈的微观演化模型,描述交通系统随技术、需求提升不断的演化升级等。最后对今年来的研究成果进行总结和展望:自主研发并推广了面向在役公路精细化管养的机器视觉关键技术及成套产品;编制并发布首个面向普通国省干线公路的基础设施三维数字化来集技术指南以及基于机器视觉感知与三维模型重建的智慧公路应用场景与平台是未来发展方向。

本次会议让我对未来交通的车路一体、自动驾驶以及混行驾驶环境等方面有了更深入的认识和了解尤其对ATS的本质与发展的认识更深刻,更明确了自己的专业兴趣和学习方向。